Le RRFRemote®
Le projet RRFRemote est développé par Armel F4HWN. Toutes les infos sur Github.com.
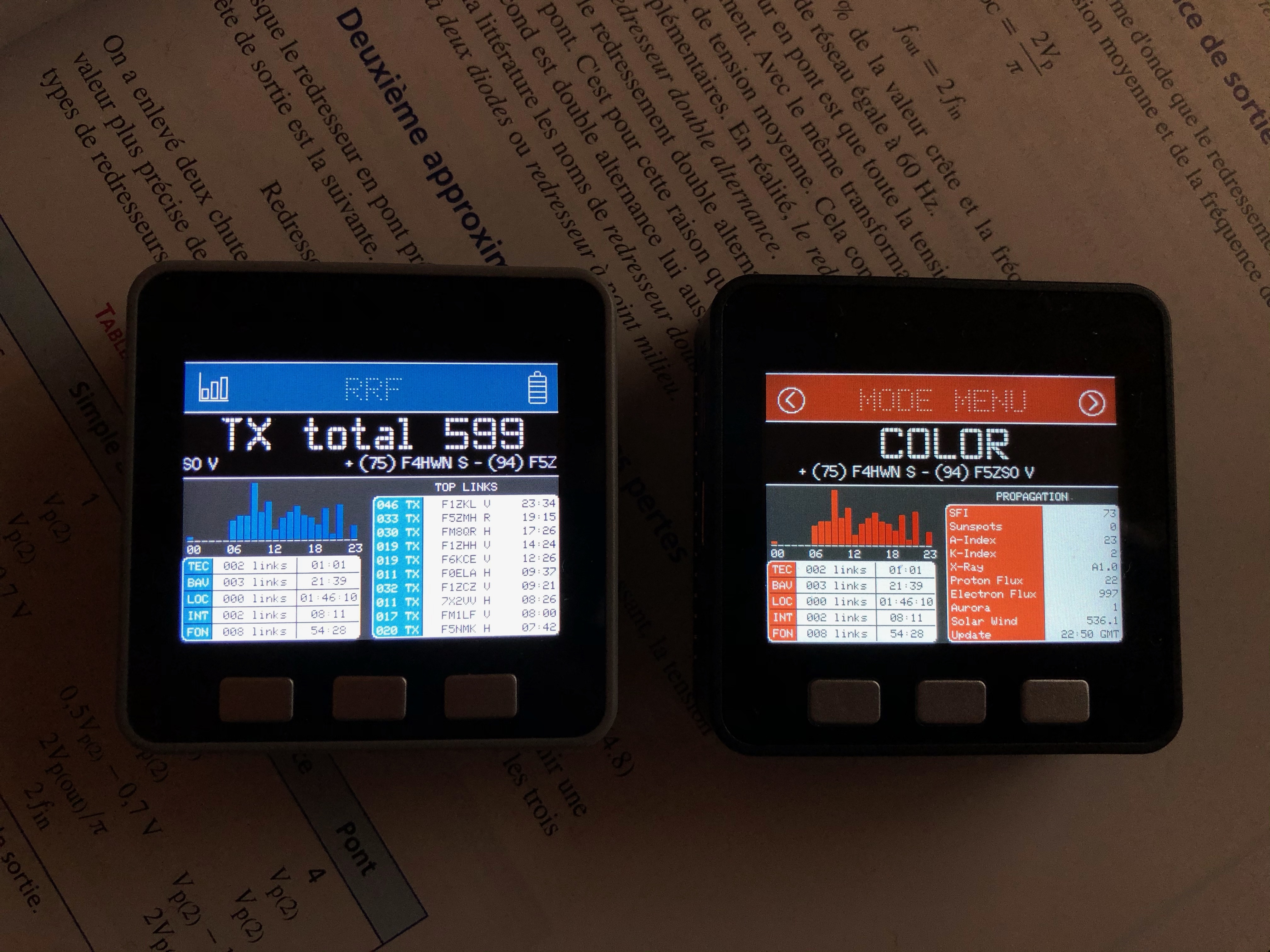
Il permet de suivre l'activité du RRF et de piloter son point d'accès ou hotpsot.
Il peut fonctionner en charge (via un connecteur USB) ou sur batterie.
Du fait de sa petite taille, on peut aussi le transporter aisément, ou le poser sur un Spotnik Delta.

Architecture technique
Présentation rapide
M5Stack est basé sur un ESP-32, dual core, pouvant être cadencé jusqu'à 240 MHz. Néanmoins, le RRFRemote fonctionne parfaitement à 80 MHz.
M5Stack dispose de 16 MB de mémoire flash. Comme tous les ESP, le Wifi est évidement intégré.
L'écran 2 pouces IPS couleur, basé sur le chipset ILI9342C, affiche une résolution confortable de 320 x 240 pixels. Il est hyper lumineux.
La batterie intégrée fait 110 mAh. Il est possible d'ajouter une batterie supplémentaire (de 700 ou 800mAh) si besoin.
En terme de dimensions et de masse, c'est très compact : 54 x 54 x 18mm pour 47,2g. Se trimbale dans la poche sans problème ;)
Specs techniques détaillées :
Voici les specs techniques détaillées, pour les curieux :
| Resources | Description |
|---|---|
| ESP32 | 240MHz dual core, 600 DMIPS, 520KB SRAM, Wi-Fi, dual mode Bluetooth |
| Flash | Memory 16MB |
| Power | Input 5V @ 500mA |
| Port | TypeC x 1, GROVE(I2C+I/0+UART) x 1 |
| Core | Bottom Port PIN (G1,G2,G3,G16, G17, G18, G19, G21, G22, G23, G25, G26, G35, G36) |
| IPS Screen | 2 inch, 320x240 Colorful TFT LCD, ILI9342C, max brightness 853nit |
| Button | Custom button x 3 |
| Speaker | 1W-0928 |
| Battery | 110mAh @ 3.7V |
| Antenna | 2.4G 3D Antenna |
| Operating Temperature | 32°F to 104°F ( 0°C to 40°C ) |
| Net weight | 47.2g |
| Gross weight | 93g |
| Product Size | 54 x 54 x 18mm |
| Package Size | 95 x 65 x 25mm |
| Case Material | Plastic ( PC ) |
En complément
Coté QSJ, compter autour de 25€. Vous disposez alors d'une plateforme de développement complète, totalement autonome, programmable en C et C++, MicroPython et UIFlow, depuis Linux, Windows ou MacOS, le tout dans un boitier compact et ultra ergonomique.
Ce QSJ est à comparer à celui d'un écran Nextion type NX4832K035, neurasthénique, dépourvu de connectivité Wifi ou GPIO, programmable sous un environnement totalement propriétaire, impliquant un cablage et incapable de fonctionner en standalone. Bref, pour reprendre une des formules du fabriquant, un écran Nextion est la meilleure solution pour remplacer les tubes LED classiques Nixie. Et nous sommes d'accord, HI ;)
Versions supportées actuellement
Le développement actuel du RRFRemote prend en charge le M5Stack Basic, le M5Stack Grey ainsi que le M5Stack Core2. Je n'ai pas testé le M5Stack Fire, mais ca devrait fonctionner.
Fonctionnalités
Au stade actuel du développement, le RRFRemote propose les fonctionnalités suivantes.
Concernant le suivi de l'activité du RRF
Voici la liste des fonctionnalités actuelles :
- suivi quasi temps réel de l'activité des salons du RRF,
- bascule de salon en salon, via les boutons gauche et droit,
- affichage de l'indicatif du link en cours d'émission et de son temps d'émission,
- affichage alterné :
- du nombre de links connectés,
- du nombre de links actifs,
- du nombre de passages en émission depuis le début de la journée,
- du temps d'émission cumulé depuis le début de la journée,
- de l'heure,
- de la distance avec l'ISS,
- affichage des links entrants et sortants, via scrolling horizontal,
- affichage du département, du locator et de la distance du link en cours d'émission, via scrolling horizontal,
- affichage alterné complémentaire :
- du top 10 des links les plus actifs,
- de l'historique des 10 derniers links passés en émission,
- des blocages RRFSentinel en cours,
- des données techniques de l'ESP32,
- des données techniques de l'activité du Soleil (propagation, SFI, SN, A Index, K Index, etc.),
- des données techniques du positionnement de l'ISS (altitude, longitude, latitude, visibilité, etc.),
- ventilation par nombre de TX dans la journée, sous forme d'histogramme,
- scanner permanent de suivi d'activité sur les autres salons,
- mise en veille automatique de l'écran, en cas d'absence d'activité pendant un temps donné.
Concernant le pilotage de son link (ou hotspot)
Voici la liste des fonctionnalités actuelles :
- QSY vers un salon,
- activation et désactivation du RRFRaptor,
- bascule en mode Perroquet,
- bascule en mode Follow,
- appel de fonctions spéciales librement paramétrables par le Sysop
- reboot du Spotnik,
- adresse IP du Spotnik,
- scan rapide du Raptor,
- libre.
Remarque 1
Si le mode Follow est activé, le RRFRemote affichera les informations du salon sur lequel se trouve votre link et il le suivra au grès de ses QSY. Il ne sera pas possible de consulter les informations d'un autre salon, à l'aide des boutons gauche et droit, à moins évidement de désactiver le mode Follow.Remarque 2
Concernant l'appel de fonctions spéciales paramétrables par le Sysop, elles sont au nombre de 4. C'est plutôt une fonctionnalité pour les power user ayant un minimum de compétence en scripting. Par défaut, et à titre d'exemple, 3 fonctions sont déjà définies : reboot et adresse IP du Spotnik ainsi que le scan rapide du Raptor. Libre à vous de les modifier ou de définir celle qui reste libre. Il vous suffit :
- d'adapter le code du script
RRFRemote.js. Ces appels de fonctions correspondent aux traitements des appels des commandescmd2000, 2001, 2002 et 2003 du scriptRRFRemote.js.- de renommer ces fonctions dans le fichier
RRFRemote.h(voir la définition du tableau de pointeursconst char *sysop[]).
En complément
Il est possible de :
- changer les couleurs du thème,
- régler la luminosité de l'écran,
- activer une alerte sonore TOT (alerte visuelle via la LED sur le CORE2),
- passer d'une configuration à une autre.
Installation
Toutes les informations pour la programmation sont données sur le Github d'Armel.